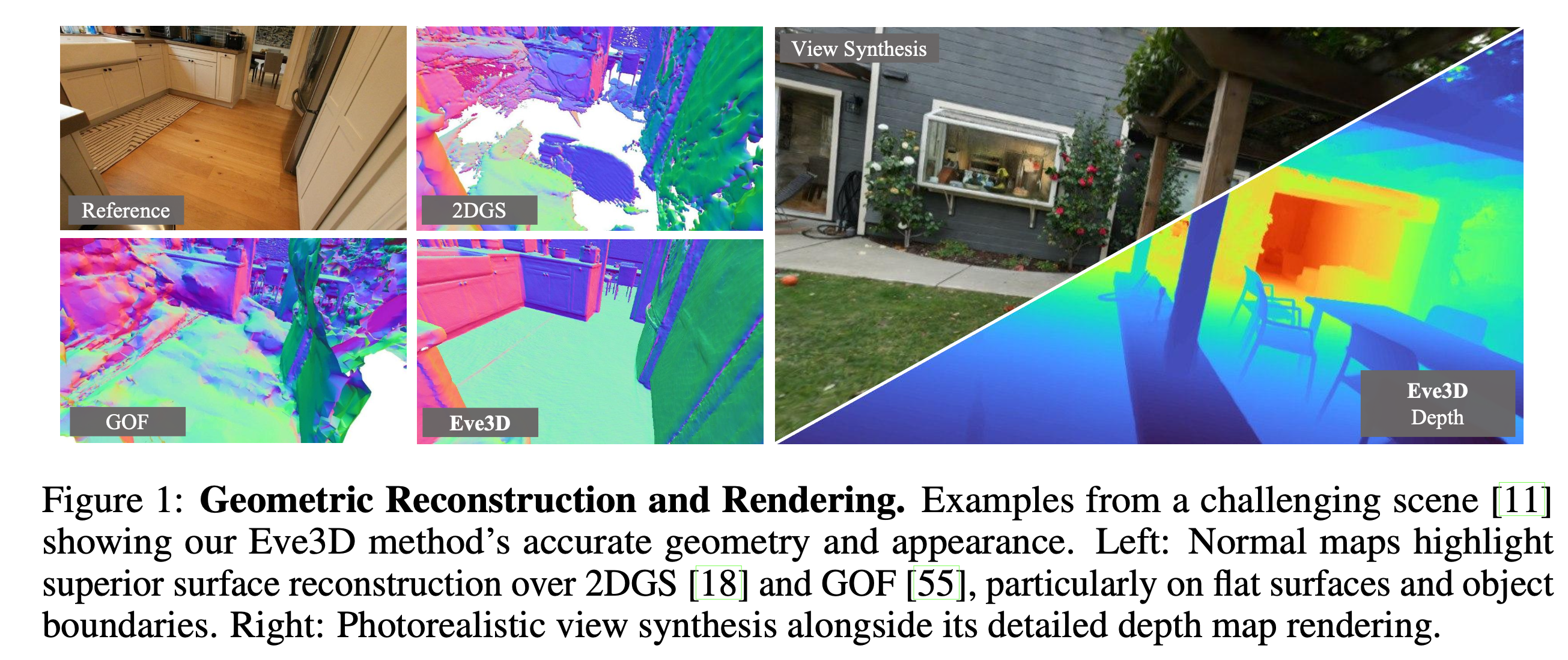
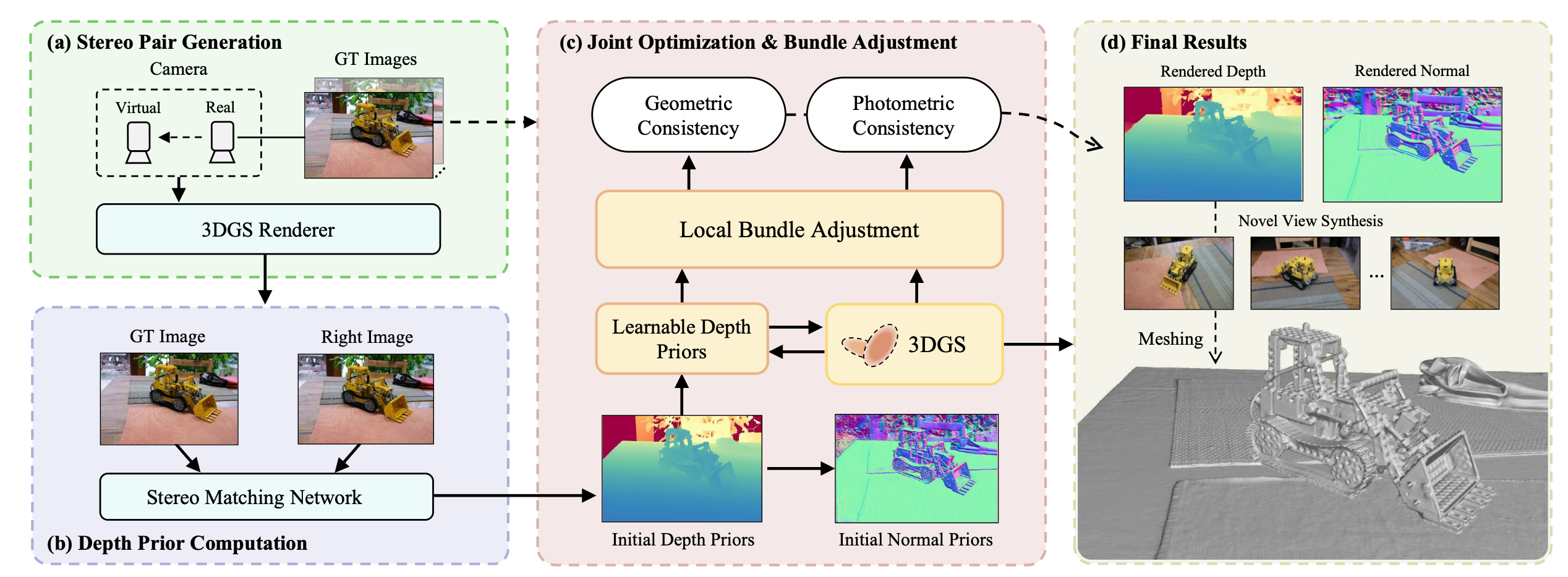
TL;DR: We present Eve3D, a novel framework for dense 3D reconstruction based on 3D Gaussian Splatting (3DGS).
While most existing methods rely on imperfect priors derived from pre-trained vision models, Eve3D fully leverages these priors by jointly optimizing both them and the 3DGS backbone. This joint optimization creates a mutually reinforcing cycle: the priors enhance the quality of 3DGS, which in turn refines the priors, further improving the reconstruction. Additionally, Eve3D introduces a novel optimization step based on bundle adjustment, overcoming the limitations of the highly local supervision in standard 3DGS pipelines. Eve3D achieves state-of-the-art results in surface reconstruction and novel view synthesis on the Tanks & Temples, DTU, and Mip-NeRF360 datasets. while retaining fast convergence, highlighting an unprecedented trade-off between accuracy and speed.
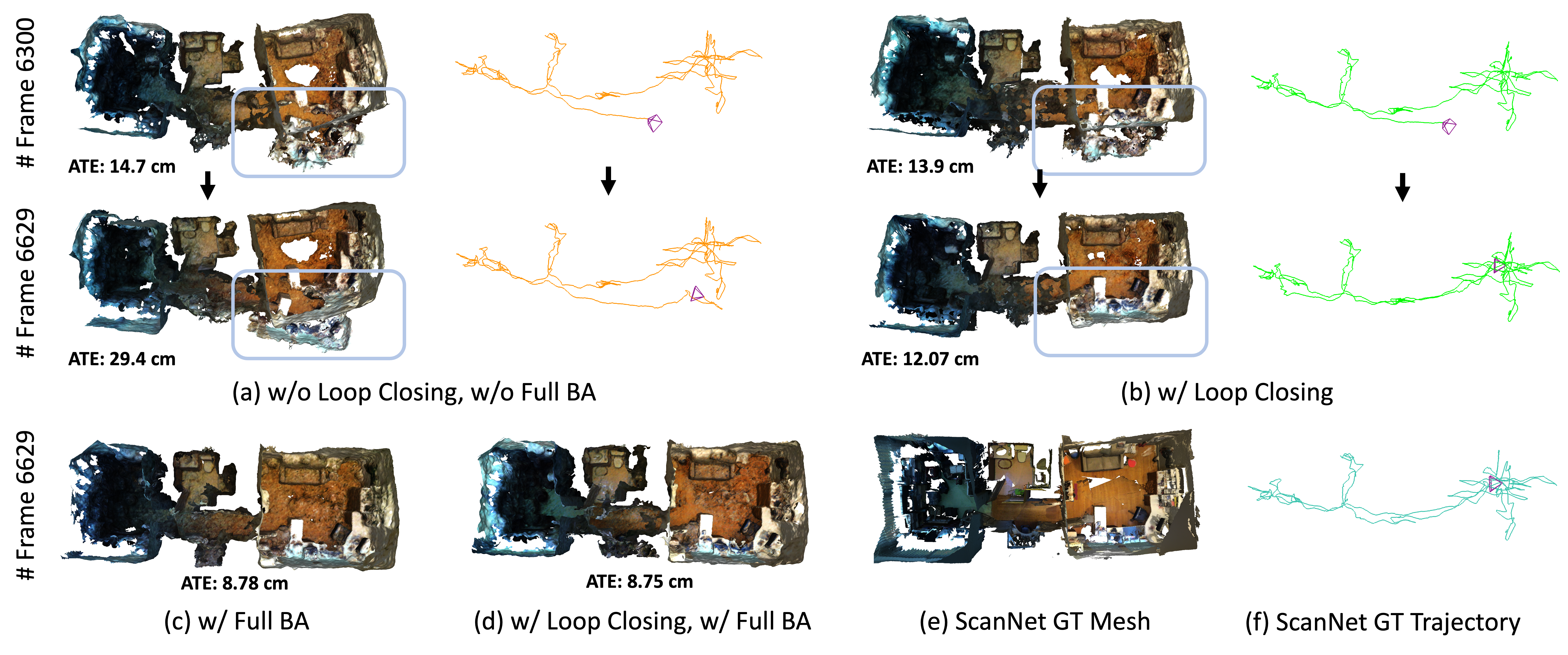
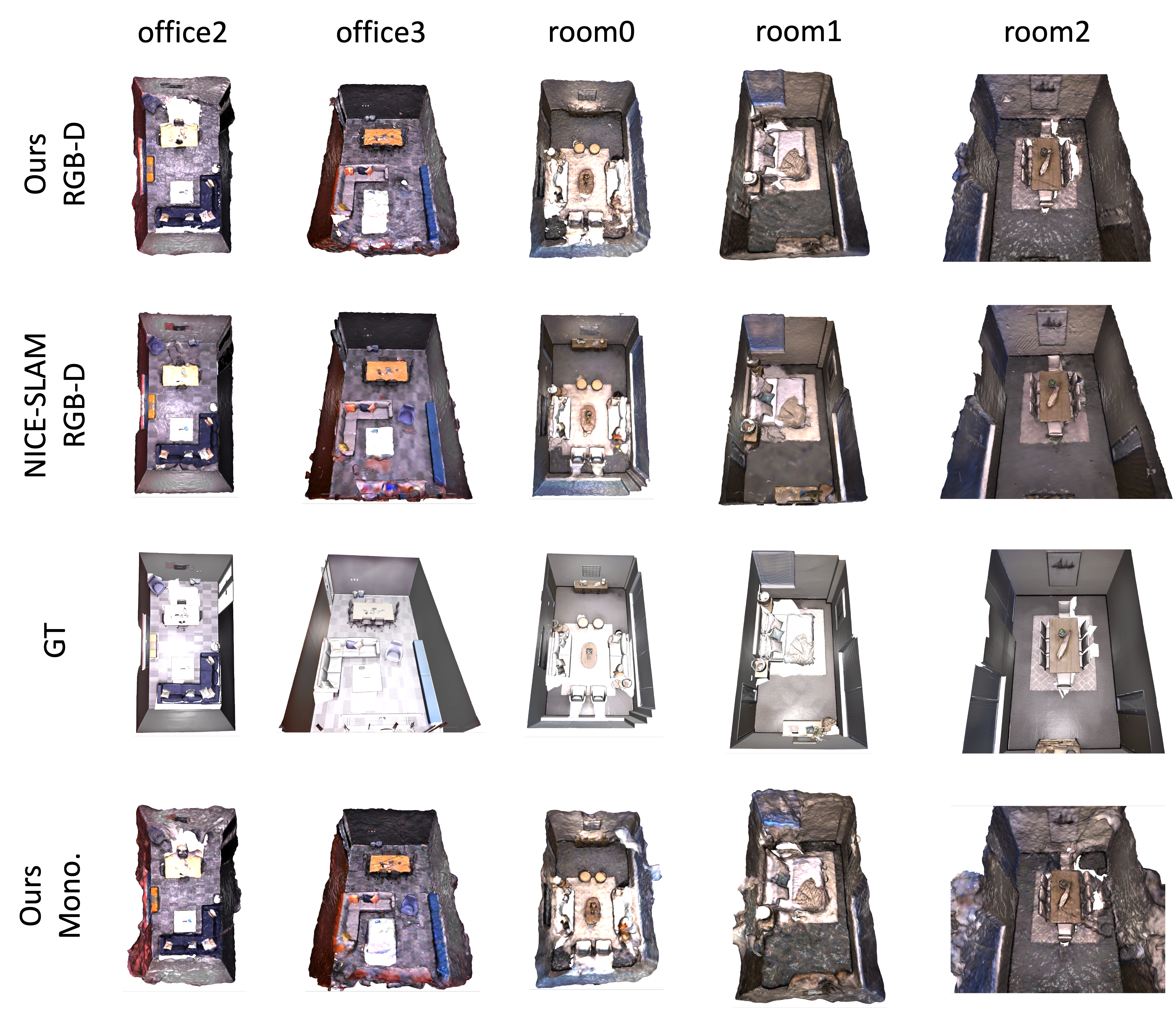
Qualitatives examples of LC and full BA on scene0054-00 of ScanNet with a total of 6629 frames. In (a), a significant error accumulates when no global optimization is available. With loop closing (b), the system is able to eliminate the trajectory error using global geometry. Additionally, online full BA optimizes (c) the poses of all existing keyframes. The final model (d), which integrates both loop closing and full BA, achieves a more complete and accurate 3D model prediction.
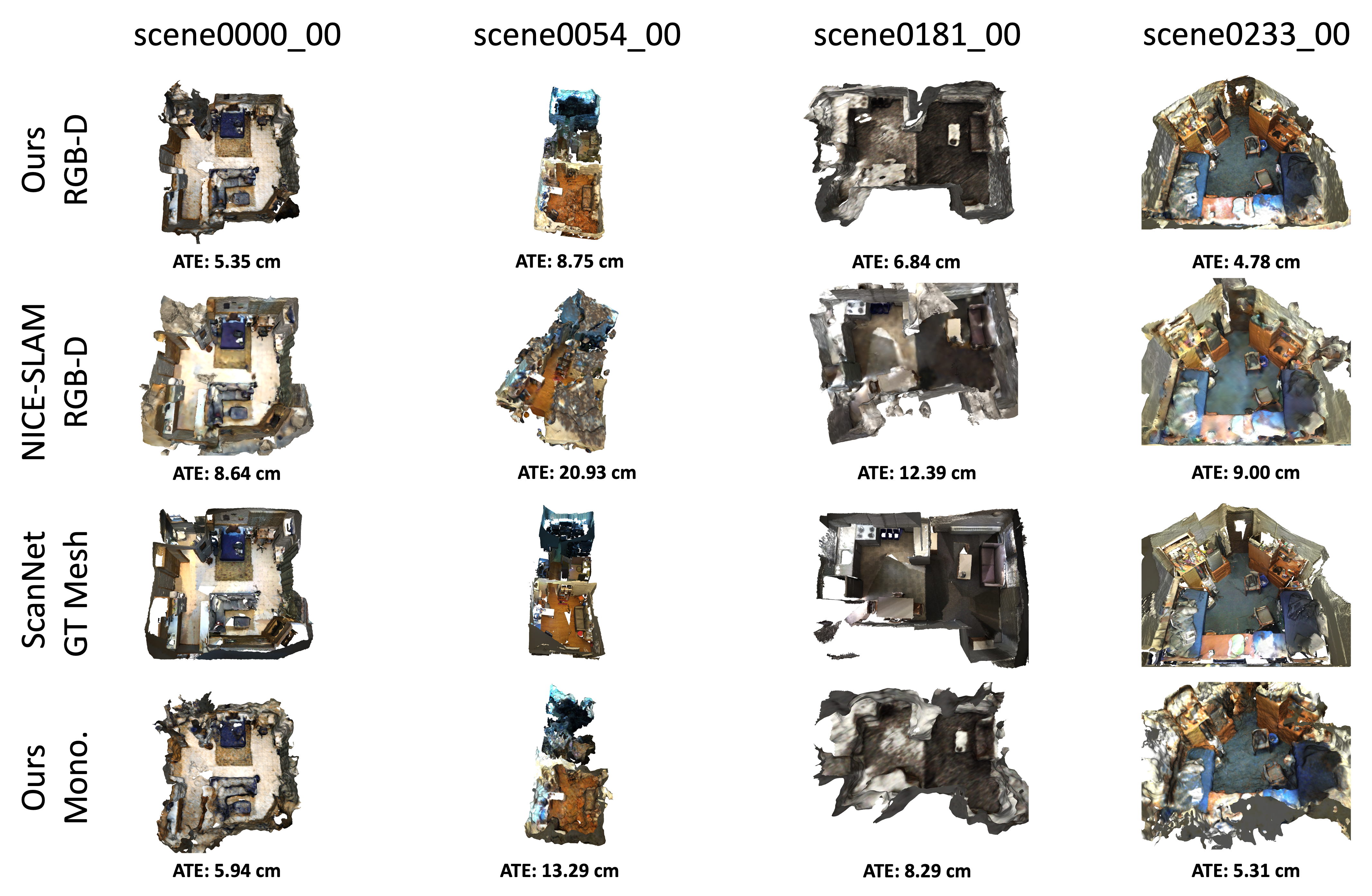
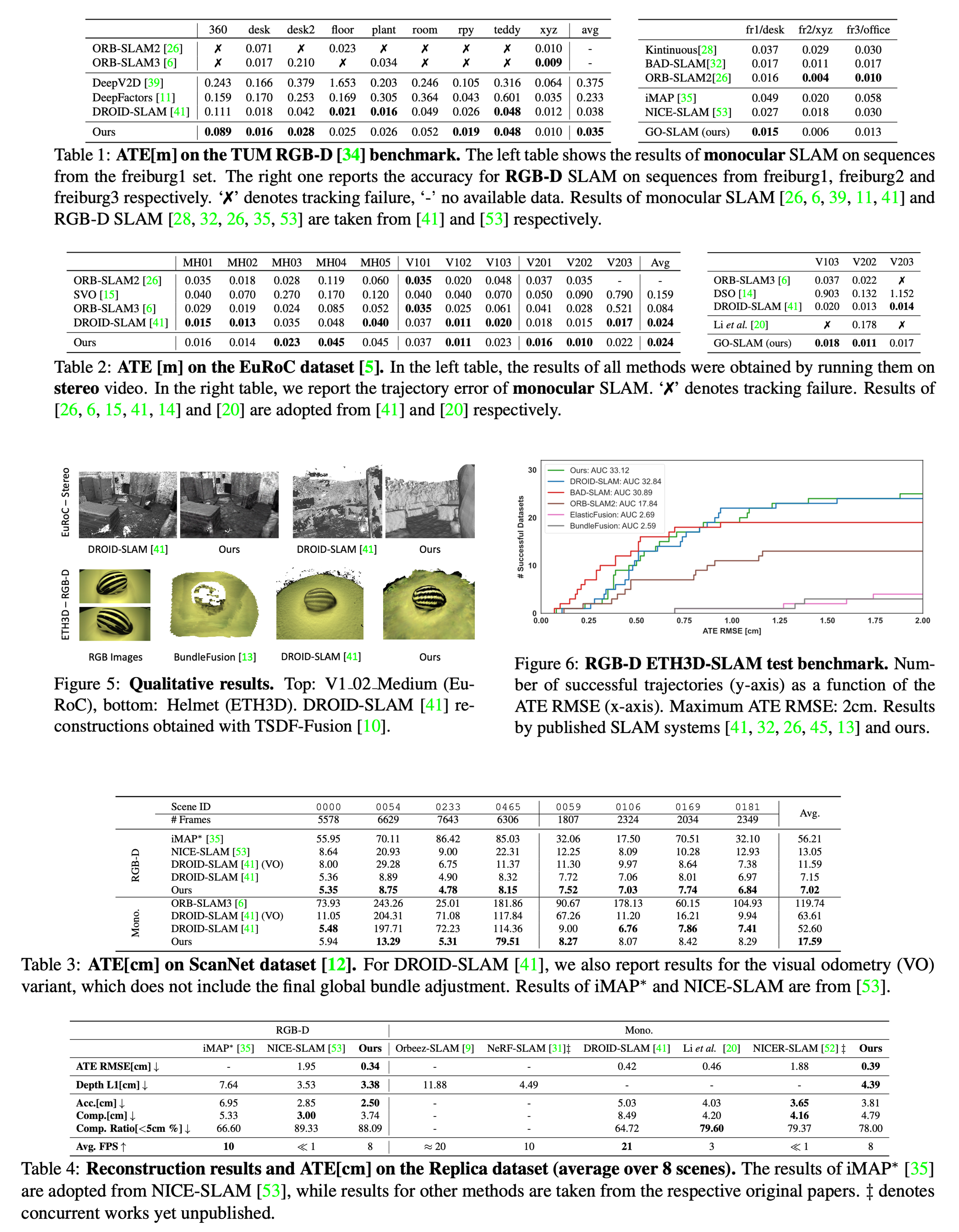
We test our SLAM in RGB-D mode on the ScanNet dataset and compare to state-of-the-art methods. Our approach achieves significantly global-consistent reconstruction results.
We test our SLAM in Stereo mode on the EuRoC dataset and compare to state-of-the-art methods. Compared to the noisy result of DROID-SLAM with several holes and floating points, GO-SLAM produces a more complete, smoother surface and a cleaner reconstruction
Our GO-SLAM support both Monocular and RGB-D modes and we test on the Replica dataset.
@proceedings{zhang2023goslam,
title = {GO-SLAM: Global Optimization for Consistent 3D Instant Reconstruction},
author = {Zhang, Youmin and Tosi, Fabio and Mattoccia, Stefano and Poggi, Matteo},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
month = {October},
year = {2023}
}